Sistemas de segurança compactos e altamente integrados para drones agrícolas.
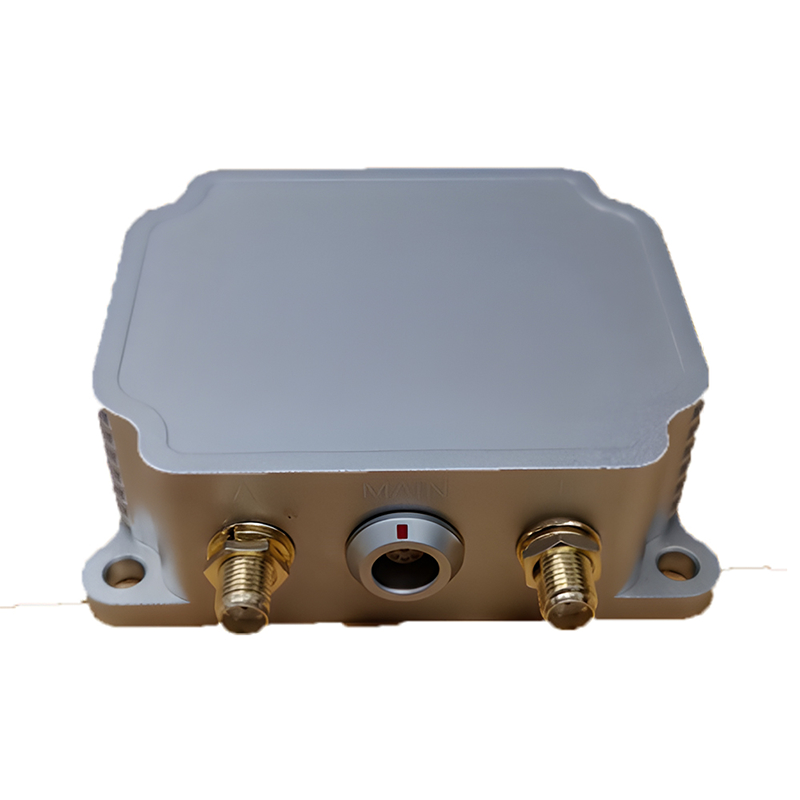
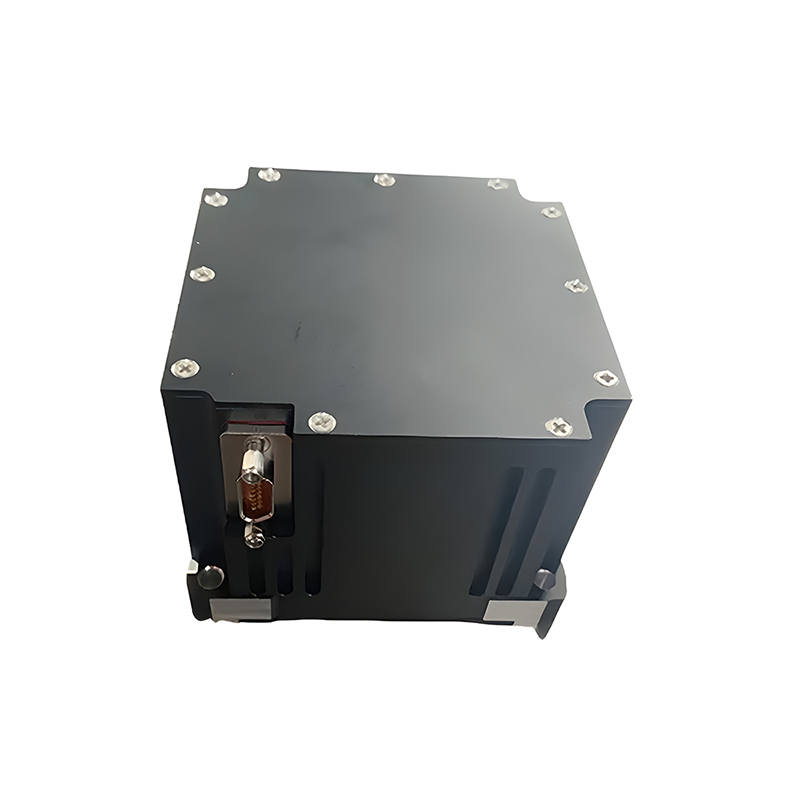
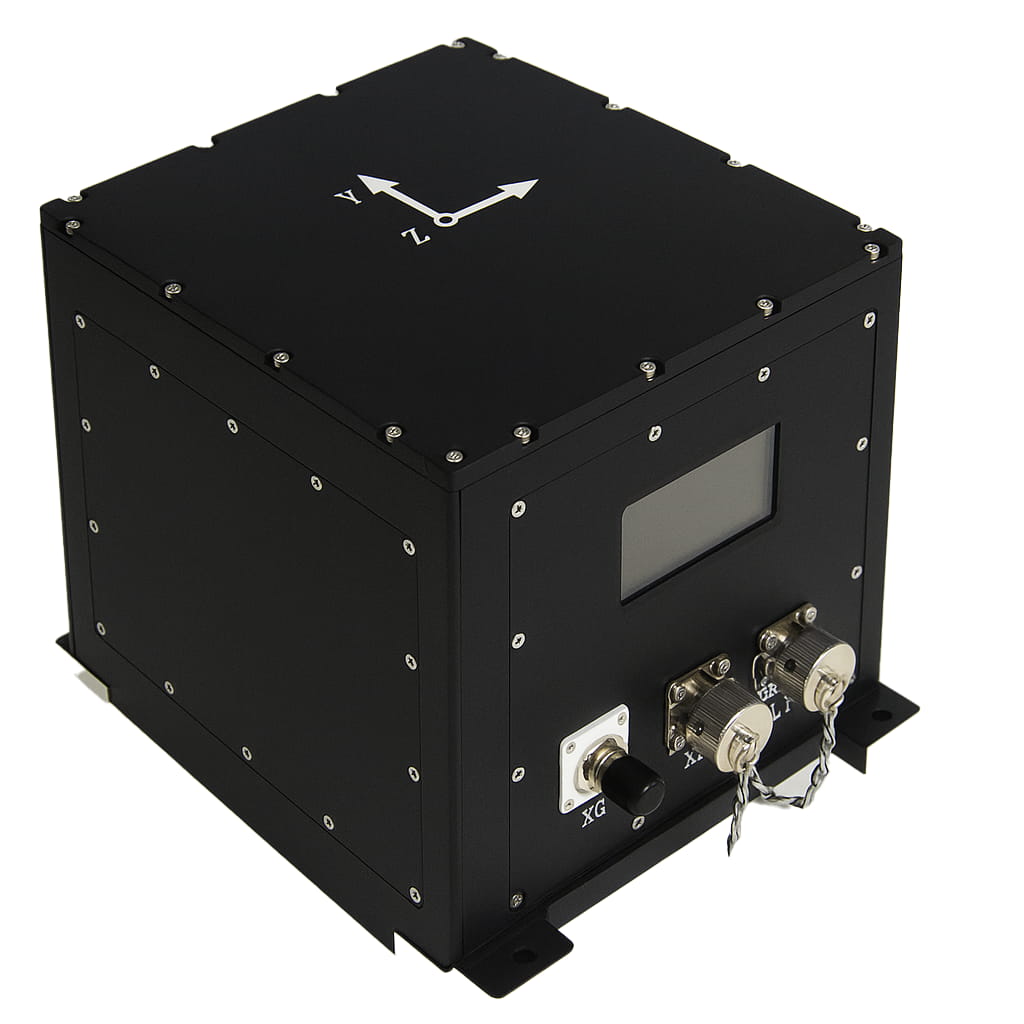
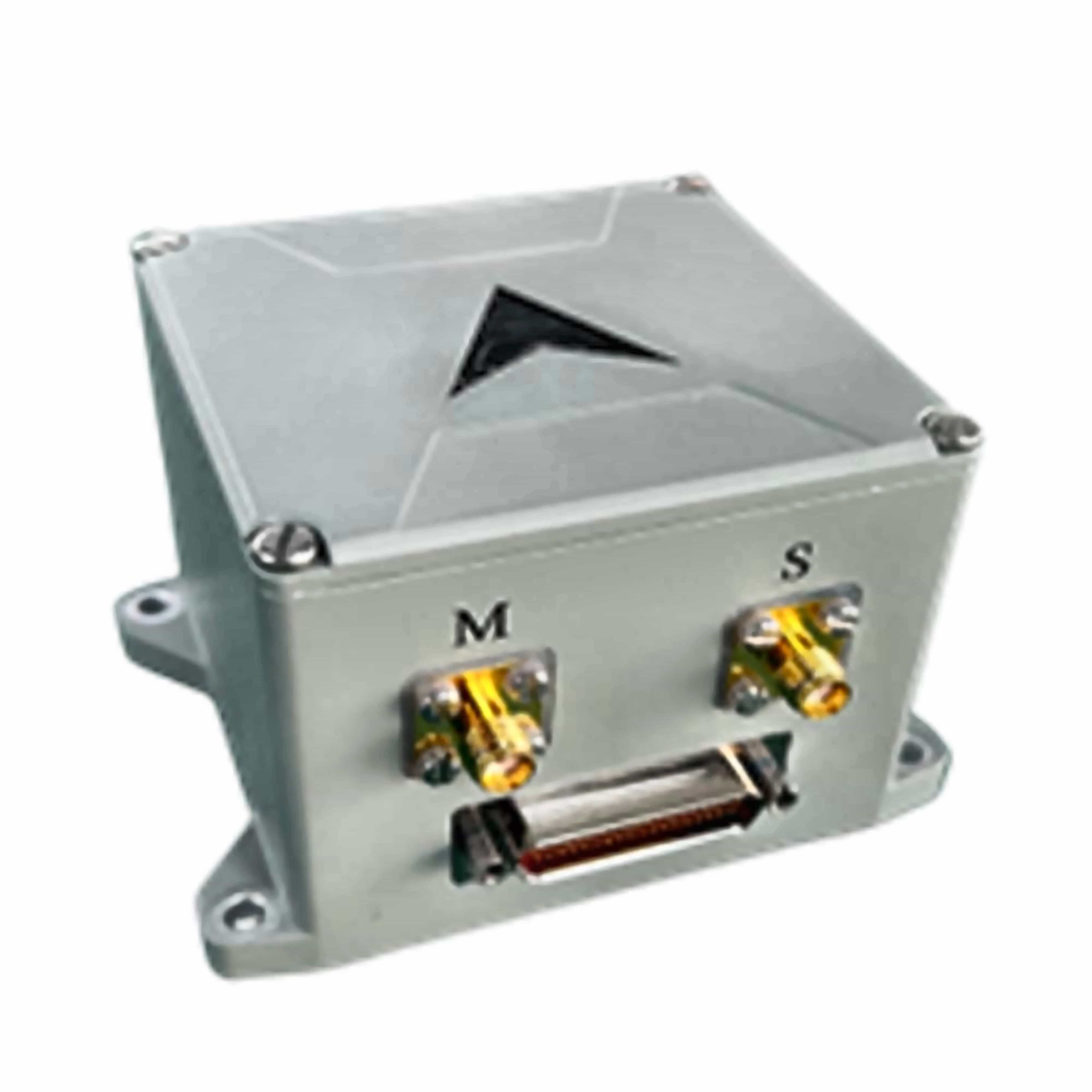
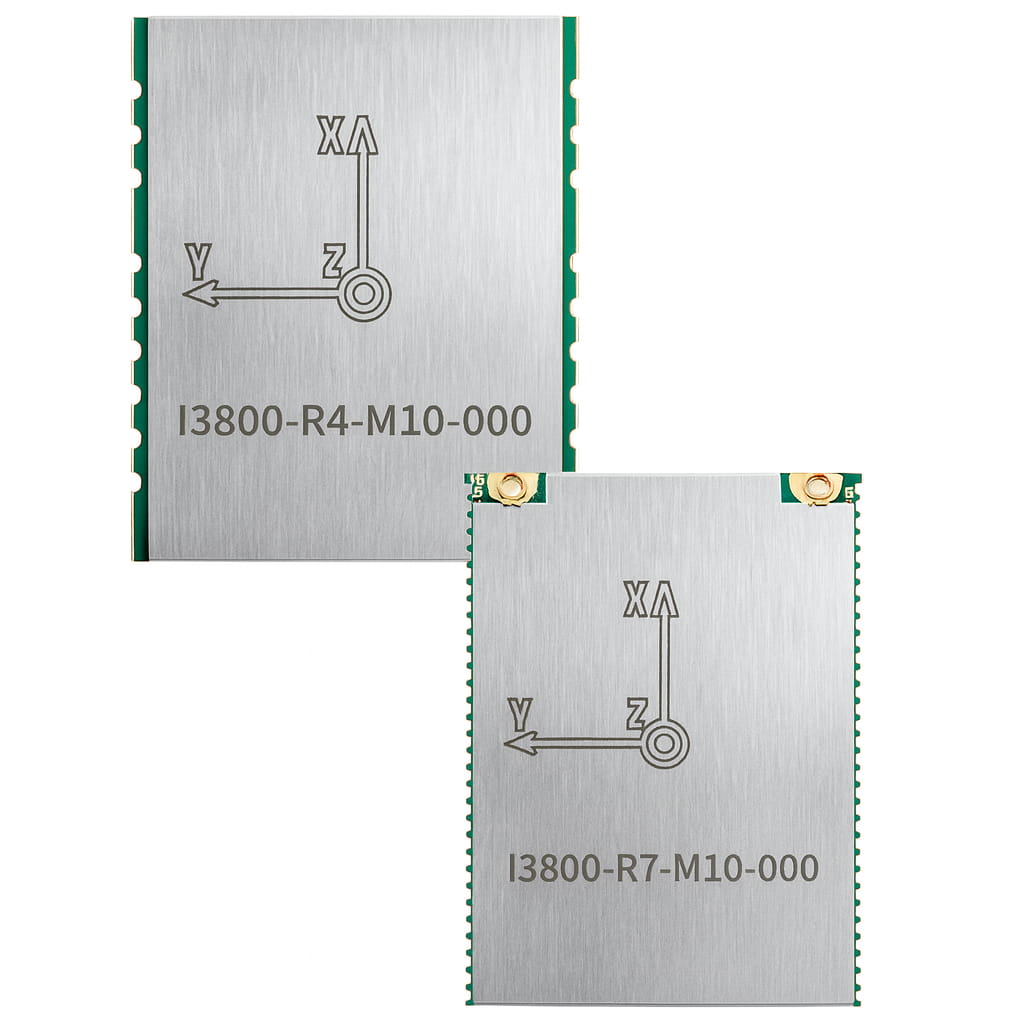
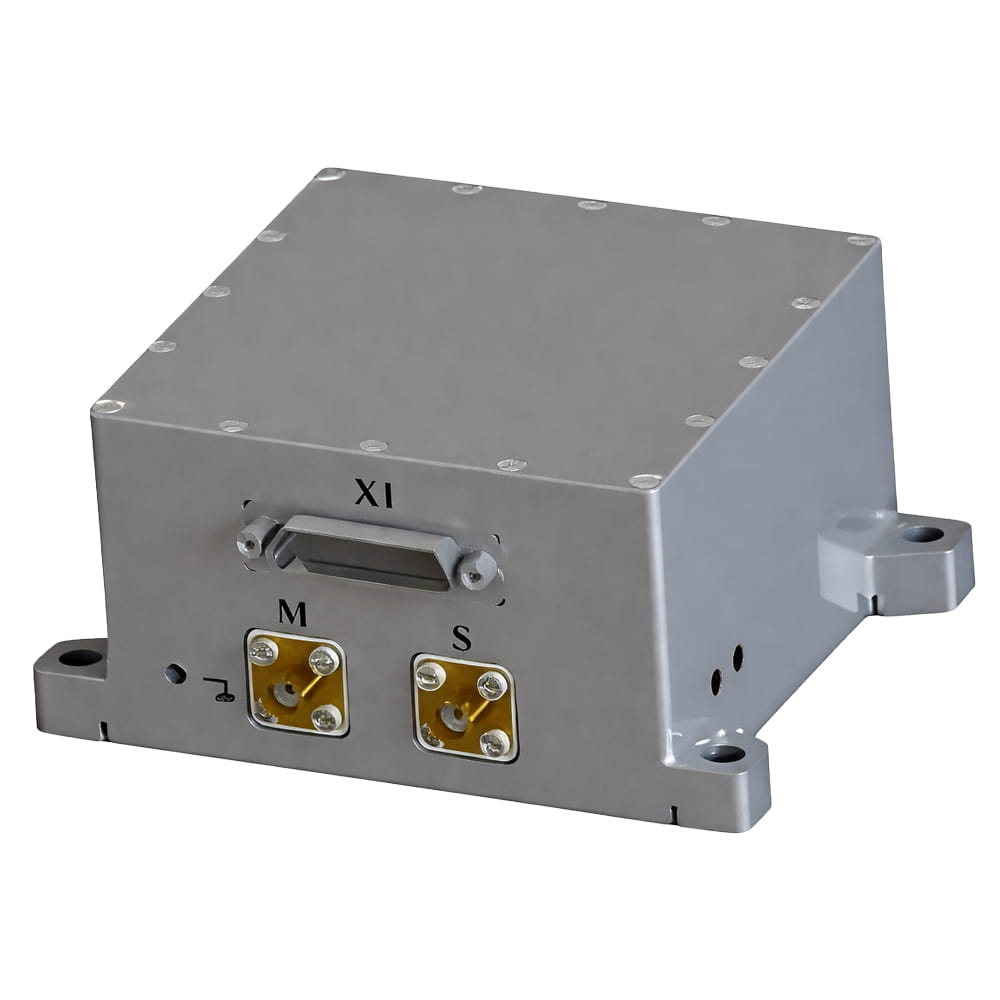
I3700 é um sistema de navegação integrado (GNSS/INS) composto por sensores MEMS de alto desempenho, sistemas GNSS de alta precisão e microprocessadores de alto desempenho. O algoritmo de navegação integrado de alta confiabilidade, desenvolvido internamente, fornece em tempo real a velocidade, a posição, a atitude e outras informações do veículo medido. Os usuários também podem conectar externamente dados de correção diferencial RTCM para obter posicionamento RTK de alta precisão. A embalagem à prova d'água IP68 facilita a integração ao sistema do usuário. As informações do modelo do produto são as seguintes:
Número da peça, :
I3700Pedido (MOQ) :
1Séries e parâmetros do produto

Processo de produção
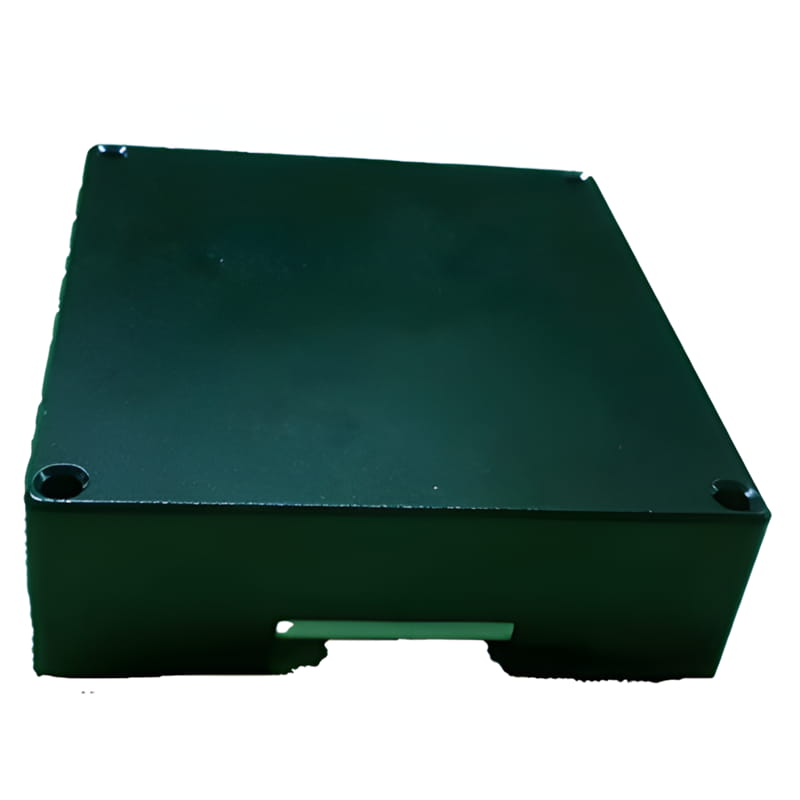
Dimensões do produto

Cenários de aplicação



Perguntas frequentes







Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português