Sensor IMU AHRS INS MEMS de nível tático U4500 para navegação de robôs marítimos e drones.

Os sensores da série U4500 são compostos por sistemas IMU/VRU/MRU/AHRS/INS MEMS-IMU de alto desempenho e nível tático, e estão equipados com filtragem de Kalman estendida adaptativa desenvolvida independentemente, algoritmos de análise dinâmica de ruído IMU, algoritmos de estimativa de oscilação vertical, algoritmos de análise do estado de movimento do veículo e algoritmos de fusão GNSS, que podem fornecer aos usuários informações precisas de posição, atitude, velocidade e outras.
Os sensores da série U4500 transmitem dados através de interfaces UART/CAN e possuem diversas opções de configuração para o usuário. (Para a comunicação CAN, é necessário conectar um transceptor externo).
A série U4500 pode sincronizar com o sistema através de acionamento externo, receber a hora UTC e também alinhar o horário com sistemas externos, como radares e câmeras, através da função de saída síncrona.
Um computador de interface gráfica multifuncional (GUI) pode ajudar a avaliar rapidamente o produto, e essas funções incluem, entre outras, configuração de módulos, exibição de dados, atualização de firmware, registro de dados, etc.
Número da peça, :
U4500Pedido (MOQ) :
1Séries e parâmetros do produto
| Parâmetros de fusão | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Inclinação/Rotação)① | 0,05 (nominal), 0,1 (máximo) | ° | ||||
| Resolução | 0,01 | ° | ||||
| Rumo (VRU/MRU) )① | 0,2 (nominal), 0,3 (máximo) | ° | ||||
| Título (AHRS) ② | 0,5 (nominal), 2 (máximo) | |||||
| Resolução | 0,01 | |||||
| Horário de início | IMU/VRU | 2 | s | |||
| MRU (estático) | 60 | |||||
| MRU (mar) | 180 | |||||
| Elevar | / | 5/5%(nom) | cm | |||
| Período de elevação | 1~10(nom) | s | ||||
| Notas: ①: Teste de rotação da plataforma giratória. ②: Medido sob a condição de que não haja interferência de campo magnético ao redor após a calibração geomagnética, e o produto precisa ser configurado no modo AHRS. |
||||||
| Giroscópio | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Faixa de medição | ±300 | °/s | ||||
| Resolução | 16 | pedaço | ||||
| Erro linear① | 300°/s -40℃-110℃ 100°/s -40℃-110℃ |
±0,15(nom), ±0,3(máx) | °/s | |||
| Erro no eixo transversal | ±0,15(máx.) | % | ||||
| Largura de banda de 3dB | 235 (nominal), 250 (máximo) | Hz | ||||
| Taxa de amostragem | 1000 | Hz | ||||
| Densidade de ruído | XY: 0,0004 Z: 0,0006 |
(°/s)/√Hz | ||||
| Instabilidade de polarização zero② | Variância de Allan | 0,3 | °/h, 1σ | |||
| Estabilidade de polarização zero | 10s suaves | 0,5 | °/h, 1σ | |||
| Repetibilidade de viés zero | 0,8 | °/h, 1σ | ||||
| Caminhada aleatória angular③ | Variância de Allan | XY: 0,015 Z: 0,025 |
°/√Hz, 1σ | |||
| temperatura total zero bias | -40-85℃ | XY: 0,25 (máx.) Z: 0,01 (nominal), 0,03 (máximo) |
°/s | |||
| Sensibilidade do acelerômetro | Para entrada de gravidade constante | 0,00075 | °/s/g | |||
| Notas: ①: O erro linear é o desvio máximo em um intervalo especificado em relação à linha de melhor ajuste determinada pelos valores medidos. ②: O valor obtido dividindo o valor mínimo da variância de Allan por 0,664. Durante a medição, utiliza-se um filtro passa-baixa de 13 Hz e uma taxa de amostragem de 200 Hz, sendo necessário um período de estabilização de 15 minutos antes do início da coleta de dados para garantir a completa estabilidade térmica. ③: O passeio aleatório angular é um termo de ruído branco estimado a partir do desvio de Allan em uma constante de tempo τ = 1 segundo. |
||||||
| Acelerômetro | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Faixa de medição | ±16 | g | ||||
| Resolução | 16 | pedaço | ||||
| Viés inicial zero | 2 | mg | ||||
| Erro linear① | 8g -40℃-110℃ | ±3(nom), ±15(máx) | mg | |||
| 1g -40℃-110℃ | ||||||
| Erro no eixo transversal | ±0,15(máx.) | % | ||||
| Largura de banda de 3dB | 210 (nominal), 235 (máximo) | Hz | ||||
| Taxa de amostragem | 1000 | Hz | ||||
| Densidade de ruído | 0,0008 | m/s²/√Hz, 1σ | ||||
| Instabilidade de polarização zero② | Variância de Allan | 0,01 | mg | |||
| Estabilidade de polarização zero | 10s suaves | 0,03 | mg | |||
| Repetibilidade de viés zero | 0,04 | mg | ||||
| Caminhada aleatória angular③ | Variância de Allan | 0,03 | m/s√h, 1σ | |||
| temperatura total zero bias | -40-85℃ | 0,5 (nominal), 2 (máximo) | mg | |||
| Notas: ①: O erro linear é o desvio máximo em um intervalo especificado em relação à linha de melhor ajuste determinada pelos valores medidos. ②: O valor obtido dividindo o valor mínimo da variância de Allan por 0,664. Durante a medição, utiliza-se um filtro passa-baixa de 13 Hz e uma taxa de amostragem de 200 Hz, sendo necessário um período de estabilização de 15 minutos antes do início da coleta de dados para garantir a completa estabilidade térmica. ③: O passeio aleatório angular é um termo de ruído branco estimado a partir do desvio de Allan em uma constante de tempo τ = 1 segundo. |
||||||
| Magnetômetro | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Faixa | / | ±20 | Gauss | |||
| Barulho | / | 450 | nT | |||
| Linearidade | / | 20 | uT | |||
| Sensor de temperatura | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Faixa | -40 – 135 | ℃ | ||||
| Erro de deslocamento | ±1 | ℃ | ||||
| Barômetro | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Faixa | / | 300 ~ 1200 | hPa | |||
| Resolução | / | 0,006 | hPa | |||
| Precisão | / | ±0,06 | hPa | |||
| Mecânica/Ambiental | Doença | U4500-A | U4500-B | U4500-C | U4500-D | Unidade |
| Fonte de alimentação VDD | 3,6 - 5,5 | V | ||||
| Consumo de energia | 370 (máx.) | mW | ||||
| VOL | 0,4 (máx.) | V | ||||
| VOH | 2,6 (min) | V | ||||
| VILA | -0,3 (mín.), 1 (máx.) | V | ||||
| VIH | 1,9 (mín.), 3,6 (máx.) | V | ||||
| Temperatura de trabalho | -125 | ℃ | ||||
| Temperatura de armazenamento | -165 | ℃ | ||||
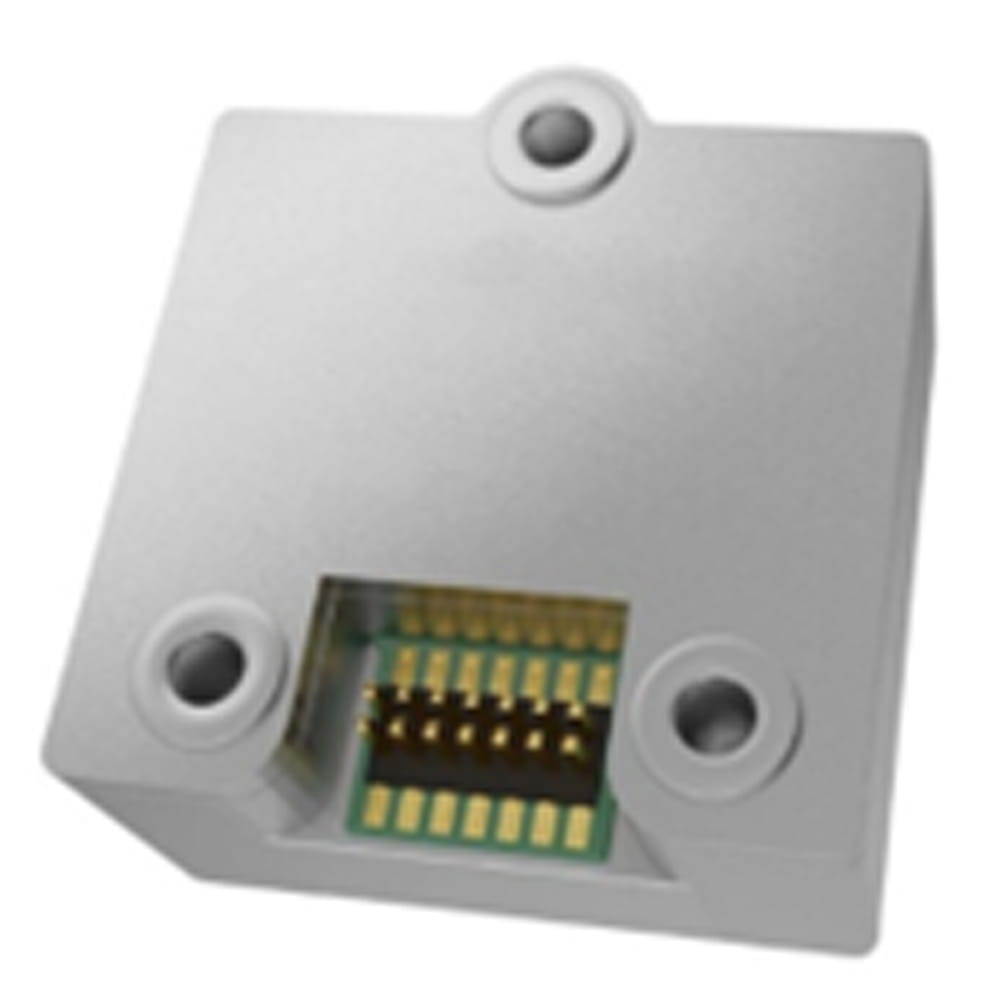
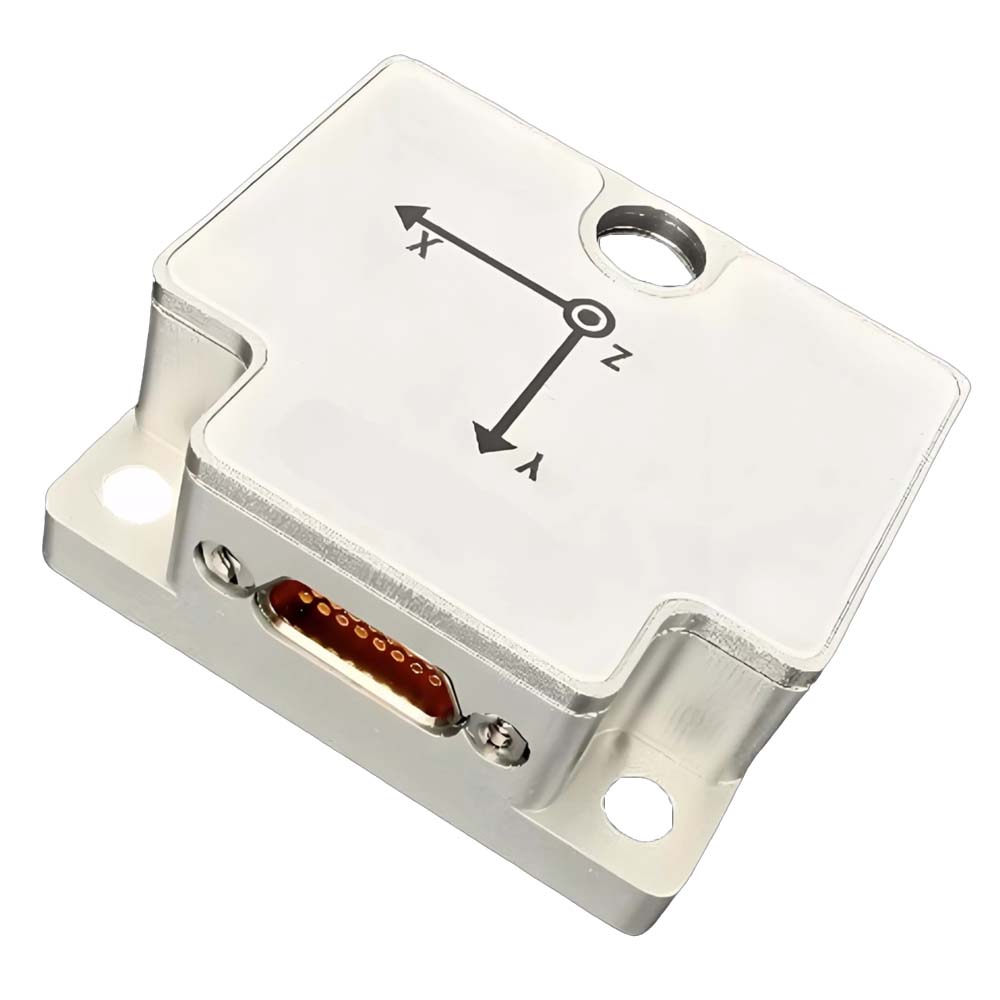
| Dimensão | 24x24x14 | mm | ||||
| Material e processo da casca | Liga de alumínio CNC | |||||
| Proteção ambiental | Diretiva RoHS 2011/65/UE | |||||
| EMC | Diretiva LVD 2014/35/UE | |||||
| Teste de queda | Queda livre 3 vezes em uma plataforma experimental de 75 cm de altura | |||||
| Choque térmico | Aumente a temperatura de -40 °C para 85 °C em 1 hora, 5 vezes. | |||||
| MTBF | 30000 | h | ||||
| impacto mecânico | 10000 | g | ||||
| ESD HBM | 2KV | JEDEC/ESDA JS-001 | ||||
| Interface | Doença | Min | Normal | Máximo | Unidade | |
| UART1/UART2 UART3 PODE |
Taxa de transmissão | 9600 | 115200 | 921600 | bps | |
| Posição inicial | 0 | 100 | 1000 | Hz | ||
| 115200 | bps | |||||
| Taxa de transmissão | 125 | 500 | 1000 | kbps | ||
| Taxa de quadros de saída | 0 | 100 | 200 | Hz |
Processo de produção
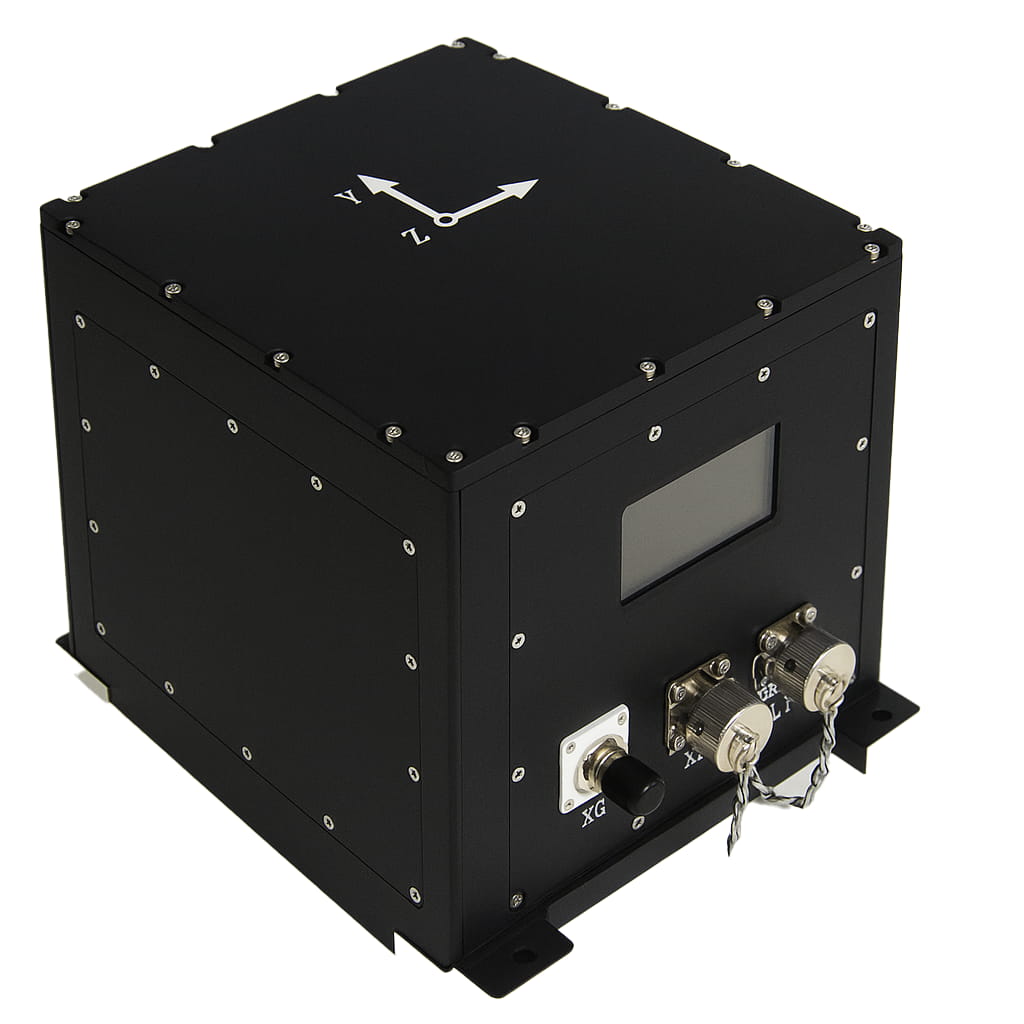
Dimensões do produto

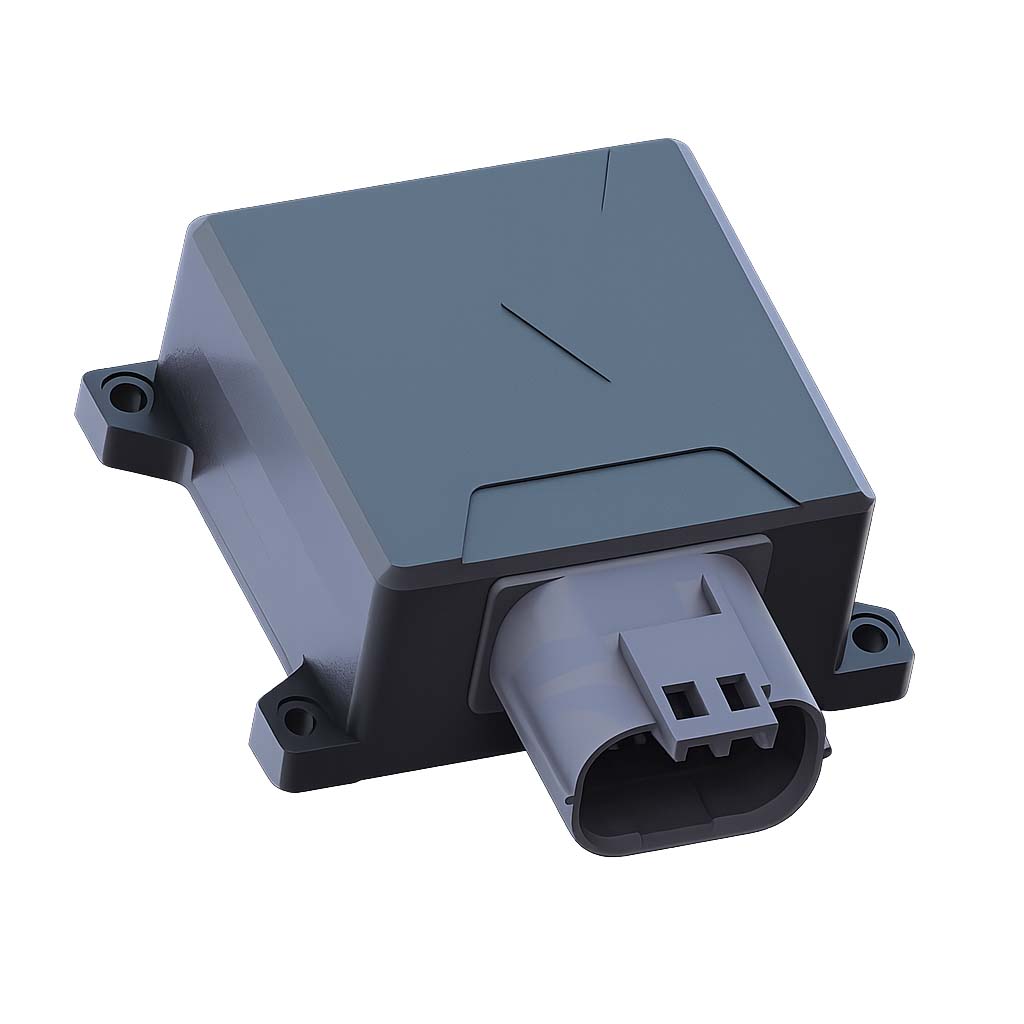
Cenários de aplicação



Perguntas frequentes
1. Para que serve o U4500?
O U4500 é um sensor MEMS IMU/VRU/MRU/AHRS/INS de nível tático, projetado para referência de atitude de UAVs, robôs não tripulados de baixa velocidade, instrumentos subterrâneos, compensação ativa de ondas, controle de atitude de navios, posicionamento dinâmico, estabilização de plataformas e máquinas de construção.
2. Quais interfaces o U4500 suporta?
O U4500 suporta interfaces UART e CAN. O barramento CAN requer um transceptor CAN externo para uso.
3. Quais funções o U4500 pode fornecer?
O U4500 integra múltiplas funções, incluindo IMU, VRU, MRU, AHRS e INS. Ele pode fornecer dados de aceleração, velocidade angular, campo geomagnético, pressão atmosférica, ângulos de Euler, quatérnios, oscilação vertical e, quando conectado a um GNSS externo, informações de posição, velocidade, atitude e tempo.












Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português