
Produto: Soluções de Navegação Integradas GNSS/INS
Principais características:
Conclusão: O projeto do sistema integrado está evoluindo, com soluções que aumentam a robustez em ambientes desafiadores, ao mesmo tempo que equilibram custo e complexidade.
Em um sistema de navegação integrado GNSS/INS, as medições do GNSS desempenham um papel crucial na correção do INS. Portanto, o funcionamento adequado do sistema integrado depende da continuidade e estabilidade dos sinais de satélite. Contudo, quando o sistema opera sob viadutos, copas de árvores ou em áreas urbanas com edifícios, os sinais de satélite podem ser facilmente obstruídos ou sofrer interferências, o que pode levar à perda de sinal no receptor GNSS. Este artigo discute soluções para manter a precisão e a estabilidade de sistemas de navegação integrados GNSS/INS quando os sinais de satélite são perdidos.
Quando o sinal de satélite fica indisponível por um período prolongado, a falta de correções GNSS faz com que os erros do INS se acumulem rapidamente, especialmente em sistemas com unidades de medição inercial de menor precisão. Esse problema leva a uma queda na precisão, estabilidade e continuidade da operação do sistema integrado. Consequentemente, é essencial abordar esse problema para aumentar a robustez do sistema integrado em ambientes tão complexos.
Atualmente, existem duas soluções principais para lidar com o cenário de perda de sinal de satélite.
Por um lado, sensores adicionais podem ser integrados ao sistema GNSS/INS existente, como odômetros, LiDAR, sensores astronômicos e sensores visuais. Assim, quando a perda do sinal de satélite torna o GNSS indisponível, os sensores recém-adicionados podem fornecer informações de medição e formar um novo sistema integrado com o INS para suprimir o acúmulo de erros do INS. Os problemas com essa abordagem incluem o aumento dos custos do sistema devido aos sensores adicionais e a potencial complexidade de projeto caso os novos sensores exijam modelos de filtragem complexos.
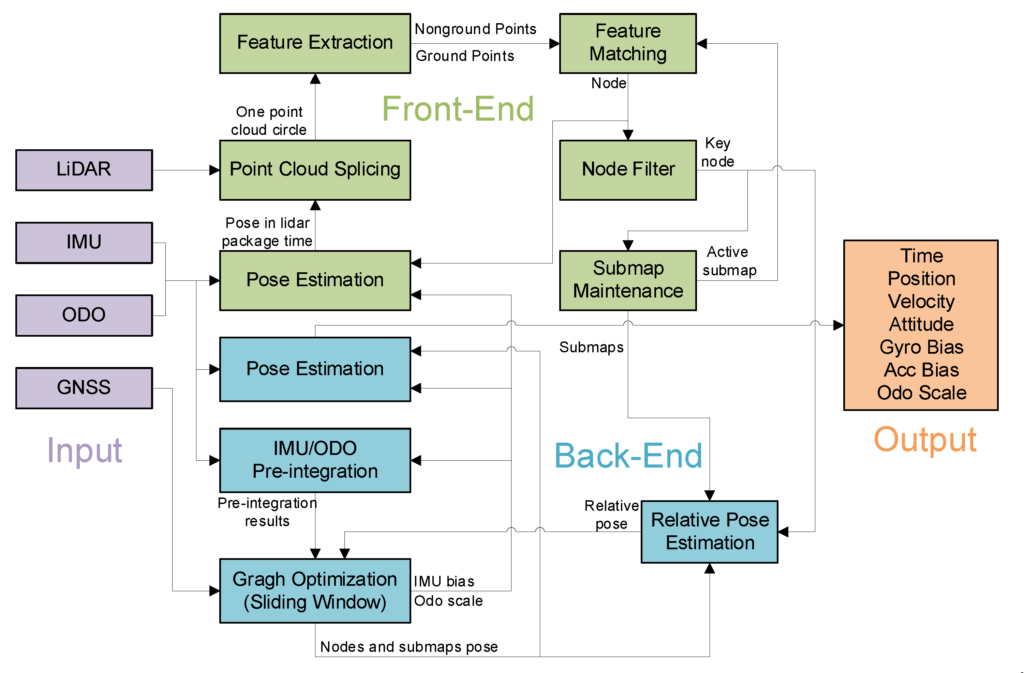
Figura 1. Visão geral do sistema de navegação integrado GNSS IMU ODO LiDAR SLAM.
Por outro lado, um modelo de posicionamento com restrições de estado de movimento pode ser estabelecido com base nas características de movimento do veículo. Este método não requer a adição de novos sensores ao sistema integrado existente, evitando assim custos adicionais. Quando o GNSS não está disponível, as novas informações de medição são fornecidas pelas restrições de estado de movimento para suprimir a divergência do INS. Por exemplo, quando o veículo está parado, a tecnologia de atualização de velocidade zero (ZUPT) pode ser aplicada para suprimir o acúmulo de erros do INS.
O ZUPT é um método de baixo custo e amplamente utilizado para mitigar a divergência do INS. Quando o veículo está parado, sua velocidade teoricamente deveria ser zero. No entanto, devido ao acúmulo de erros do INS ao longo do tempo, a velocidade de saída não é zero, de modo que a velocidade de saída do INS pode ser usada como uma medida do erro de velocidade. Assim, com base na restrição de que a velocidade do veículo é zero, uma equação de medição correspondente pode ser estabelecida, fornecendo informações de medição para o sistema integrado e suprimindo o acúmulo de erros do INS.
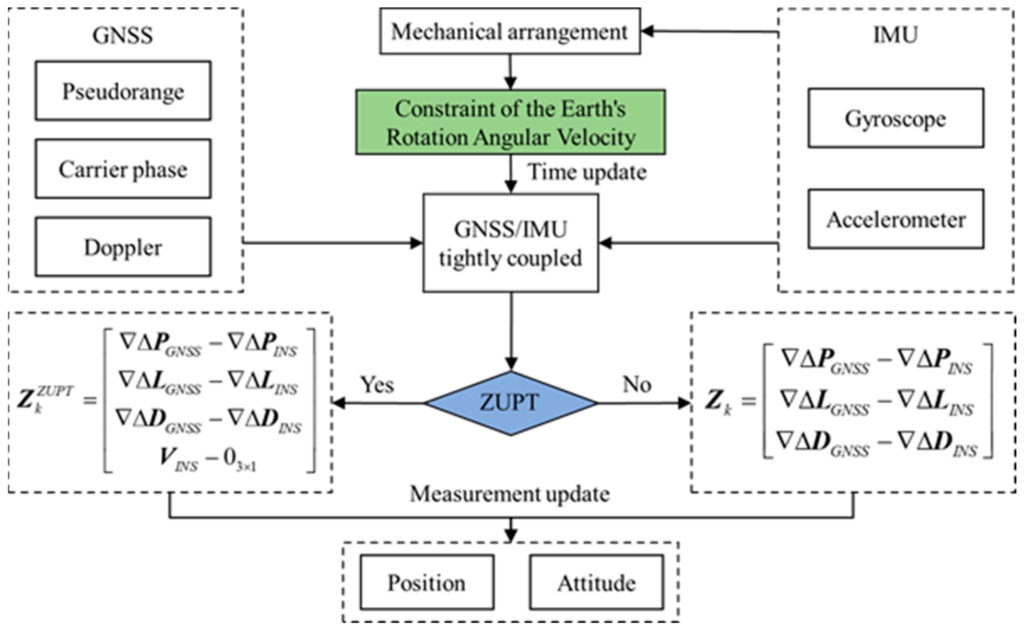
Figura 2. Fluxograma do algoritmo GNSSIMU baseado em ZUPT, acoplado ao CERAV.
No entanto, a aplicação do ZUPT exige que o veículo esteja parado, tornando-se uma tecnologia de atualização de velocidade zero estática que não consegue fornecer informações de medição durante manobras normais do veículo. Em aplicações práticas, isso exige que o veículo pare frequentemente, reduzindo sua capacidade de manobra. Além disso, o ZUPT requer a detecção precisa dos momentos de parada do veículo. Se a detecção falhar, informações de medição incorretas podem ser fornecidas, levando potencialmente à falha deste método e até mesmo causando a redução ou divergência da precisão do sistema integrado.
A perda de sinais de satélite pode causar um rápido acúmulo de erros no INS, particularmente em ambientes complexos como áreas urbanas. Duas soluções principais são apresentadas: adicionar sensores adicionais, como LiDAR ou sensores visuais, para fornecer medições alternativas, ou usar restrições de estado de movimento, como a tecnologia de Atualização de Velocidade Zero (ZUPT), para corrigir os erros do INS. Cada abordagem tem suas próprias vantagens e desafios, sendo que a integração de sensores aumenta os custos e a complexidade, enquanto a ZUPT exige que o veículo esteja parado e seja detectado com precisão para ser eficaz.
A Micro-Magic Inc. está na vanguarda da tecnologia de navegação inercial e lançou recentemente três produtos GNSS/INS MEMS com diferentes níveis de precisão (nível industrial, nível tático e nível de navegação). Notavelmente, o GNSS/INS MEMS de nível industrial I3500 apresenta uma instabilidade de polarização de 2,5°/h e uma variação angular aleatória de 0,028°/√h, além de um acelerômetro MEMS de alta precisão com ampla faixa de medição (±6g, instabilidade de polarização zero). <30 μg).

Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português









