Na era do rápido avanço da tecnologia de drones, seja para levantamentos e mapeamento aéreo de alta definição, proteção de plantas na agricultura de precisão ou entrega de suprimentos de emergência e monitoramento ambiental complexo, os drones evoluíram de simples brinquedos controlados remotamente para robôs aéreos altamente inteligentes. Por trás dessa transformação está a demanda quase obsessiva do sistema de controle de voo por dados precisos de atitude e movimento em tempo real. A principal tecnologia que atende a essa demanda é o sensor inercial microeletromecânico (MEMS) — que atua como o "ouvido interno" e os "nervos do equilíbrio" do drone, detectando silenciosamente cada mudança de atitude e estado de movimento. Esses sensores servem como a base física que permite aos drones alcançar voo estacionário estável, navegação autônoma, manobras ágeis e controle preciso.
Os sistemas tradicionais de navegação inercial de alta precisão dependem de giroscópios e acelerômetros ópticos ou mecânicos volumosos, caros e com alto consumo de energia, o que limita severamente sua aplicação em drones de consumo e industriais que priorizam leveza, baixo custo e longa autonomia. Os avanços revolucionários na tecnologia MEMS transformaram completamente esse cenário. Ao integrar perfeitamente estruturas de sensores mecânicos em microescala com processos de circuitos integrados, essa tecnologia miniaturizou os sensores inerciais ao nível do chip. Por exemplo, a série ACM-1700 de acelerômetros MEMS de alto desempenho de eixo único da Micro-Magic emprega processos MEMS avançados, alcançando uma ampla faixa de ±10g a ±200g, uma largura de banda de até 100Hz e excepcional estabilidade de polarização (até 50μg) em um encapsulamento compacto de apenas 7,8 x 5,8 x 3 mm. Com uma construção robusta capaz de suportar impactos de até 10.000 g e compensação de temperatura em toda a faixa através de sensores de temperatura integrados, a série ACM-1700 garante confiabilidade e consistência de medição durante manobras agressivas de drones e em ambientes complexos. Seja monitorando a aceleração ou desaceleração linear de drones ou detectando vibrações causadas pelo vento ou por manobras, a série ACM-1700 fornece entradas de dados precisas.

ACM-1700
| Faixa de medição | ±10~30/±30~50/±70~100/±150~200g |
| Eixo de medição | X |
| Estabilidade de polarização zero (10s, 1)σ) | 50/100/200/500μg |
| Coeficiente de temperatura de polarização zero (temperatura máxima) | 50/50/100/200μg/℃ |
| Resistência ao impacto | 10000g,2ms,1/2 seno |
| Erro de retificação de vibração (6grms) | 0,4/0,15/0,05mg |
| Protocolo de comunicação | I2C/SPI/UART |
| Sinal de saída | Digital |
| Tamanho da embalagem | Chip, 7,8*5,8*3mm |
| Peso | 1,5g |
No entanto, perceber apenas a aceleração linear é insuficiente para descrever completamente o estado de movimento de um drone. O movimento rotacional, especificamente a velocidade angular em torno de três eixos, é igualmente crucial para a determinação da atitude. O giroscópio MEMS de eixo único de alta precisão da série MG-XXXX da Micro-Magic foi projetado precisamente para esse propósito. Esta série emprega uma estrutura MEMS inovadora capaz de medir com precisão a velocidade angular ao longo do eixo de rotação perpendicular à superfície do chip. Seu alto desempenho é caracterizado por ruído extremamente baixo e excepcional estabilidade de polarização, fornecendo feedback preciso da velocidade angular para o controle de voo do drone. Através de sua interface digital SPI flexível e registros configuráveis (como o ajuste da largura de banda de saída de 12,5 Hz a 800 Hz ou a configuração das taxas de atualização de dados de 62,5 Hz a 2000 Hz), o sistema de controle de voo pode otimizar a resposta do sensor para diferentes modos de voo (por exemplo, cruzeiro suave ou manobras ágeis), alcançando o melhor equilíbrio entre a supressão de ruído de alta frequência e a manutenção de uma resposta de sinal rápida. A combinação das séries MG-XX e ACM-1700 forma, em princípio, o par de sensores fundamental para que os drones percebam seu movimento espacial tridimensional.

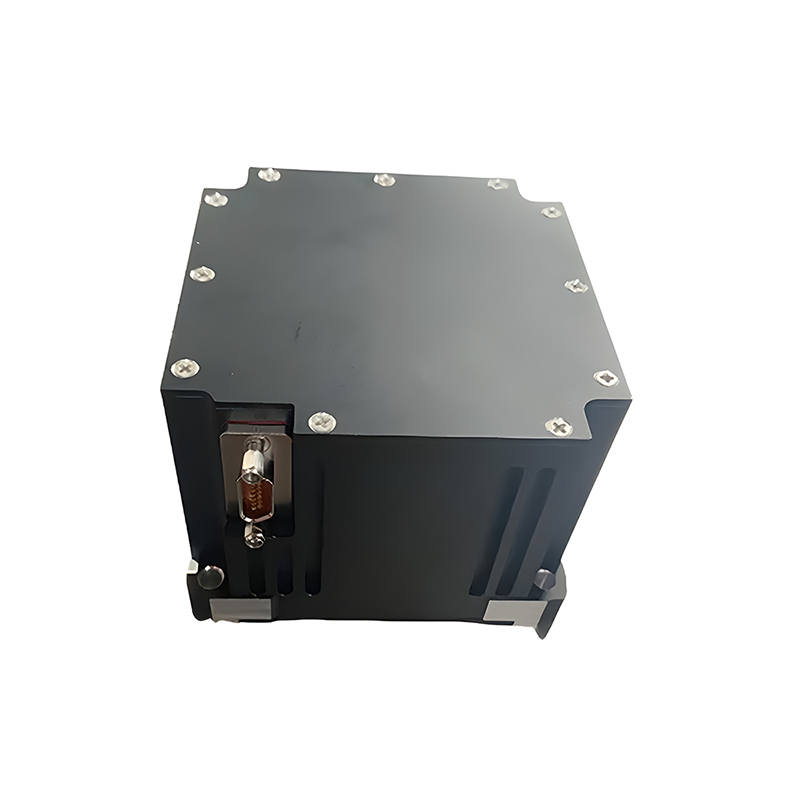
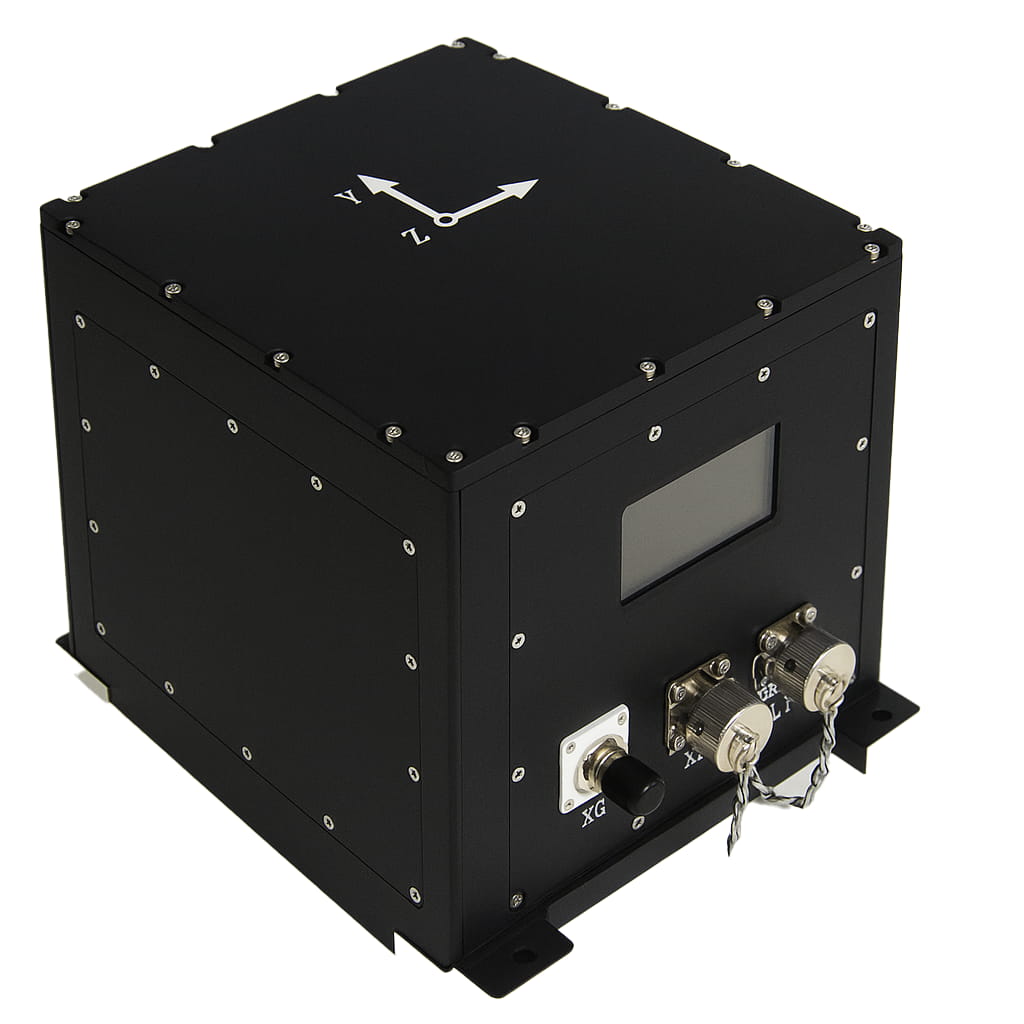
No entanto, integrar múltiplos chips de sensores MEMS independentes e de alto desempenho (giroscópio de três eixos + acelerômetro de três eixos) no controle de voo de drones e processar seus dados brutos para obter informações de atitude estáveis e utilizáveis é um desafio complexo de engenharia que envolve calibração de precisão, compensação de temperatura, algoritmos de fusão de sensores e processamento de dados em alta velocidade. É exatamente aí que reside o valor dos módulos de medição inercial MEMS, como o U503, U4930 e U16575. Não se trata de uma simples pilha de sensores, mas de uma solução altamente integrada e inteligente. Este tipo de módulo IMU é alojado em uma robusta caixa de liga de alumínio e permite o posicionamento e a instalação precisos de giroscópios e acelerômetros MEMS de três eixos, integrando microprocessadores de alto desempenho.
Tomando como exemplo o módulo IMU U4930, seu principal diferencial reside na calibração completa de temperatura e na compensação em nível de sistema realizadas antes da entrega. O processador interno do módulo não apenas coleta dados brutos de seis eixos em alta velocidade (até 2000 Hz), mas, mais importante, aplica uma matriz de parâmetros de compensação pré-calibrada em uma ampla faixa de temperatura (de -40 °C a +85 °C) para realizar a compensação digital em tempo real de dezenas de erros, como erro de polarização zero, não linearidade do fator de escala, erro de não ortogonalidade e sensibilidade à aceleração (sensibilidade g) do giroscópio para cada sensor. Isso permite que o módulo forneça diretamente dados de alta precisão de velocidade angular (°/s) e aceleração (m/s²) após a calibração de temperatura e a correção de erros. Os usuários não precisam mais realizar calibrações complexas em laboratório, o que simplifica bastante a integração do sistema e garante a consistência e a confiabilidade do desempenho em diferentes condições climáticas. A interface RS422 que oferece pode transmitir pacotes de dados estáveis contendo velocidade angular, aceleração, temperatura interna e registros de tempo de alta precisão a uma frequência de até 200 Hz. Também pode transmitir sinais de pulso diferencial TOV rigorosamente sincronizados com a amostragem de dados, facilitando o alinhamento temporal preciso com sistemas externos, como o GPS, o que é crucial para a navegação integrada.
Em voos reais de drones, esses dados inerciais limpos dos módulos IMU são inseridos em tempo real no núcleo do controle de voo — algoritmos de cálculo de atitude e navegação (geralmente baseados em filtros de Kalman). O algoritmo integra de forma inteligente as informações de força específica medidas pelo acelerômetro (usado para determinar a direção da gravidade, ou seja, os ângulos de inclinação e rotação) com as informações de velocidade angular medidas pelo giroscópio (usado para integrar e obter as mudanças de atitude). Por meio dessa "fusão de sensores", o sistema consegue superar as respectivas limitações dos acelerômetros, que são suscetíveis à interferência de vibrações durante manobras dinâmicas, e a deriva da integração do giroscópio ao longo do tempo, fornecendo, assim, informações estáveis, precisas e sem erros em tempo real sobre atitude tridimensional (inclinação, rotação e guinada), velocidade angular e aceleração linear. Essas informações são a base do controle em circuito fechado no controle de voo: o controlador de voo compara o ponto de referência alvo ou as instruções do controle remoto com a atitude e posição atuais em tempo real, calcula os comandos de empuxo precisos de cada motor e conduz o drone para completar uma série de ações complexas, como pairar, subir, virar, desviar de obstáculos, etc.
Portanto, desde a percepção básica de grandezas físicas fornecida pelo acelerômetro ACM-1700 e pelo giroscópio MG-XXXX em nível de chip, até o fornecimento de dados integrado, calibrado e inteligente alcançado pelas unidades de medição inercial U503, U4930 e U16575 em nível de módulo, a tecnologia de sensores inerciais MEMS constitui uma pilha tecnológica completa, resolvendo gradualmente o problema da percepção de atitude de drones camada por camada. Esses sensores permitem que drones modernos não apenas 'voem', mas também 'voem de forma estável', 'voem com precisão' e 'voem de forma inteligente'. Com o aprimoramento dos níveis de direção autônoma e o aumento da complexidade das tarefas, os requisitos de desempenho dos sensores inerciais MEMS também aumentarão. As soluções MEMS de alto desempenho e altamente integradas, em constante evolução, são sem dúvida o suporte fundamental indispensável para que os futuros veículos aéreos não tripulados avancem rumo à autonomia completa, ao agrupamento e à inteligência.

Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português