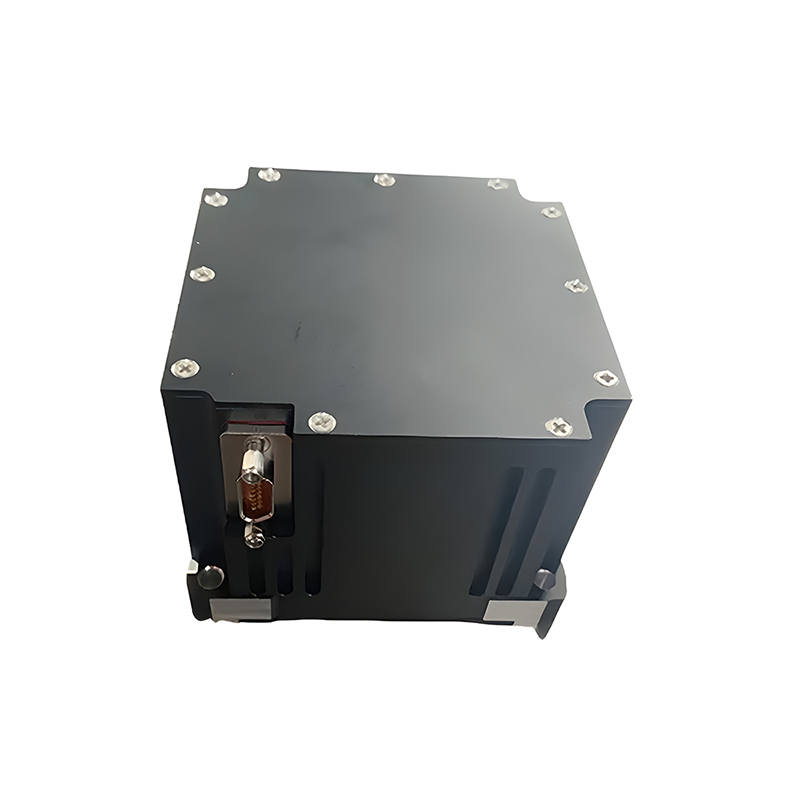
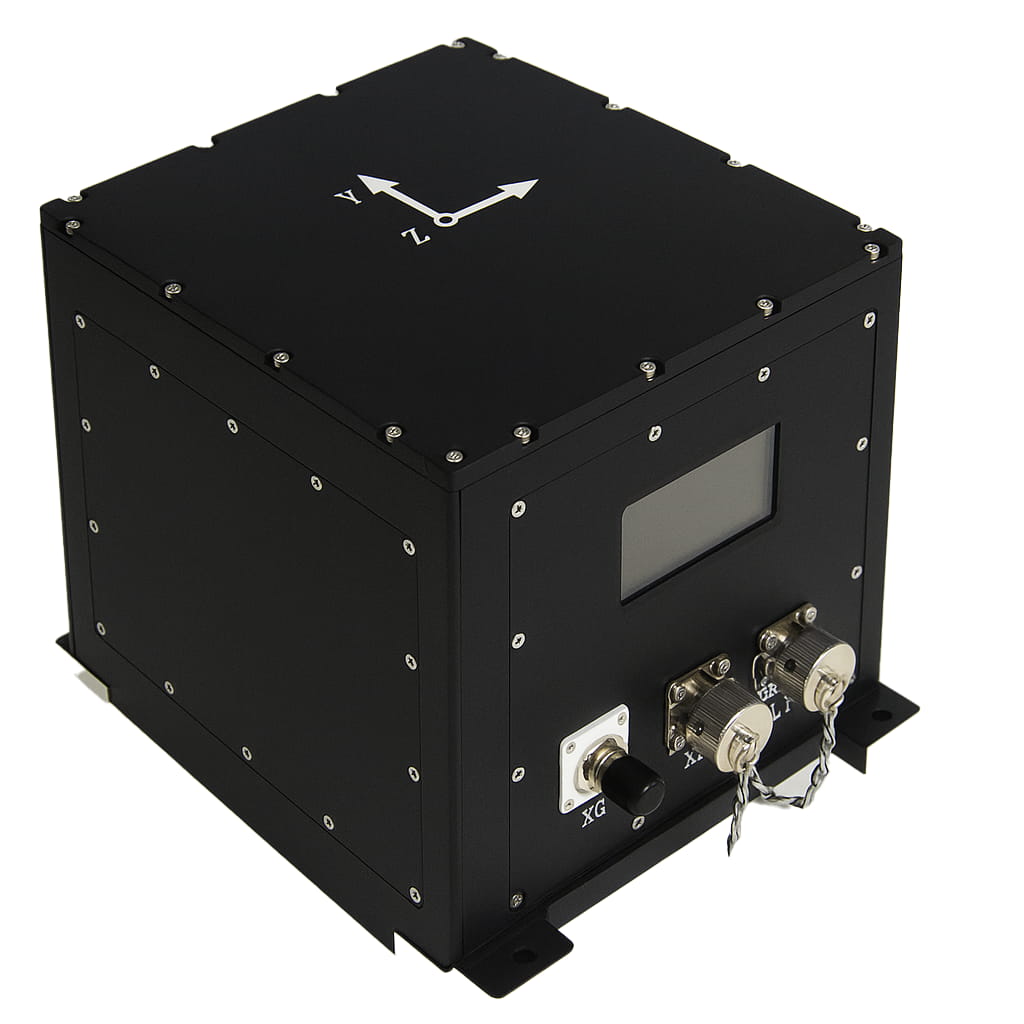
A série A5500 é um sensor IMU/VRU/AHRS composto por uma IMU MEMS de alto desempenho, um magnetômetro e um giroscópio de eixo único aprimorado. Equipado com filtro de Kalman estendido adaptativo desenvolvido internamente, algoritmo de análise dinâmica de ruído da IMU e algoritmo de análise do estado de movimento do sensor, o sensor garante a precisão do ângulo de atitude em condições de alta dinâmica e reduz a deriva do ângulo de direção. Cada sensor passa por uma compensação precisa, incluindo temperatura, viés de zero, fator de escala e eixo transversal, antes de sair da fábrica.
Número da peça, :
A5500Pedido (MOQ) :
1Séries e parâmetros do produto

Processo de produção
Dimensões do produto

Cenários de aplicação



Perguntas frequentes

Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português