Os sistemas de navegação inercial (INS) desempenham um papel crucial na tecnologia de condução autônoma, especialmente para superar as limitações de outros sensores, como GPS, câmeras e LiDAR. Eles fornecem informações contínuas, de alta frequência e sem interferências sobre o estado do movimento, sendo um dos componentes essenciais da percepção e do posicionamento em condução autônoma.
A função principal do sistema de navegação inercial em condução autônoma é a percepção do estado de movimento do veículo. Ele mede a posição tridimensional, a velocidade e o ângulo de atitude (incluindo inclinação lateral, inclinação longitudinal e guinada) do veículo. A unidade de medição inercial (IMU), como sensor principal do INS, possui uma frequência de atualização de dados muito alta (geralmente acima de 100 Hz), muito superior à do GPS (1-10 Hz) e à de câmeras/LiDAR (10-30 Hz), e consegue capturar as mudanças dinâmicas instantâneas do veículo.
Normalmente, em sistemas de navegação para condução autônoma, os sinais de GPS são frequentemente perdidos ou instáveis, causando interrupções ou degradação severa do sinal, como em túneis, garagens subterrâneas e sob pontes elevadas, onde os sinais de satélite são completamente bloqueados; em áreas urbanas com muitos prédios altos, os sinais de GPS sofrem forte reflexão e interferência de múltiplos caminhos, resultando em uma diminuição significativa ou mesmo falha na precisão do posicionamento; em florestas densas, as folhas também podem bloquear os sinais de satélite.
Neste ponto, os sistemas INS geralmente desempenham um papel importante. Através da navegação inercial, com base na posição e atitude precisas conhecidas no momento anterior, a aceleração e a velocidade angular medidas pela IMU são integradas para calcular o deslocamento relativo atual e a mudança de atitude do veículo, calculando assim a nova posição e atitude. Isso garante a continuidade do posicionamento. Ao fornecer informações de atitude de alta frequência, mesmo quando o sinal de GPS é bom, as informações de atitude de alta frequência e alta precisão (rolagem, inclinação, guinada) fornecidas pelo INS são difíceis de serem fornecidas por outros sensores isoladamente.
A tabela a seguir compara os indicadores de desempenho de navegação do Sistema de Navegação Integrado I4500 durante cenários de navegação assistida por satélite versus cenários de perda de sinal de satélite.
Desempenho do sistema I4500
Parâmetros | Índice (RMS) | Comentários | |
Precisão do cabeçalho | GNSS duplo | 0,1° | linha de base de 2 m |
GNSS único | 0,2° | Precisa manobrar | |
precisão de retenção em caso de falha do GNSS | 0,2°/min |
| |
Atitude Precisão | GNSS é válido | 0,1° |
|
precisão de retenção em caso de falha do GNSS | 0,2°/min |
| |
Modo VG (Tempo de falha do GNSS ilimitado, sem aceleração) | 2° |
| |
Precisão de posicionamento horizontal | GNSS é válido | 1,2 m | Ponto único |
2cm+1ppm | RTK | ||
Falha do GNSS (60s) | 20m |
| |
Os modernos sistemas de condução autônoma adotam, sem exceção, a tecnologia de fusão de sensores. O INS (Sistema de Navegação Inercial) é um nó fundamental nessa estrutura de fusão.
⚪ Ao integrar-se com o GNSS, forma-se um sistema de navegação integrado GNSS/INS, que é a combinação mais clássica e consolidada. O GNSS fornece posicionamento absoluto e estabilidade a longo prazo, mas as atualizações são lentas e suscetíveis a interferências; o INS fornece informações de movimento relativo e atitude contínuas e de alta frequência, mas apresenta erro cumulativo (deriva). O filtro de Kalman aproveita as vantagens de ambos para se corrigir mutuamente: o GNSS corrige a deriva do INS, e o INS fornece posicionamento contínuo e uma saída GNSS estável quando o GNSS falha. Além disso, ele pode melhorar a precisão e a robustez gerais, e a precisão e a confiabilidade do sistema combinado são muito superiores às do GNSS ou do INS isoladamente.
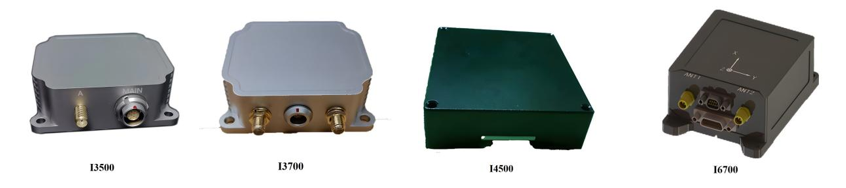
⚪ Ao integrar-se com o velocímetro, este fornece informações sobre a velocidade da roda (velocidade, distância percorrida), o que pode auxiliar na correção de erros do sistema de navegação inercial (INS) na estimativa de velocidade, especialmente quando o veículo está em linha reta. A tabela a seguir mostra os indicadores de desempenho do sistema de navegação integrado I3700, produzido pela Micro-Magic Inc. Mesmo em caso de perda de sinal de satélite, é possível obter alta precisão de medição graças à fusão de algoritmos do INS e do velocímetro da roda.
Índices de precisão de navegação I3700
Tempo de travamento perdido | Modo de navegação | Precisão de posicionamento | Precisão de velocidade | Precisão de inclinação/rotação | Precisão do cabeçalho |
3s | Conecte ao odômetro | 1 cm | 0,03 m/s | 0,1° | 0,2° |
10s | 1m | 0,1 m/s | 0,1° | 0,2° | |
anos 60 | 6m | 0,1 m/s | 0,2° | 0,35° |
⚪ Ao integrar-se com SLAM visual/LiDAR, os dados de alta frequência da IMU podem fornecer previsão de movimento para processamento visual ou LiDAR, reduzindo a complexidade computacional da correspondência de imagens ou de nuvens de pontos e melhorando o desempenho e a robustez em tempo real (especialmente em ambientes com movimentos rápidos ou texturas fracas). As informações precisas de atitude (rotação, inclinação) fornecidas pelo INS são cruciais para analisar corretamente as relações geométricas das imagens da câmera ou das nuvens de pontos LiDAR em declives e estradas irregulares.
Casos de aplicação
Tomando como exemplo o produto I6700 lançado pela Micro-Magic Inc., este sistema pode integrar diversos sensores auxiliares, como GNSS, odômetro, magnetômetro, etc., e fornecer uma função precisa de correção de direção para veículos em diversos cenários de operação.
Método de correção de cabeçalho I6700
Função | Doença | Comentários |
Direção da antena GNSSDual | Habilitação de antena dupla | Adequado para campos abertos |
Alinhamento cinemático | Avião、Automotivo e Marítimo | Adequado para ambientes com grandes manobras, com uma velocidade de transporte de pelo menos 3 m/s. |
Direção verdadeira do GPS | GPS ativado | Adequado para campos abertos |
Alinhamento de aceleração | Modo helicóptero | Aceleração de pelo menos 2,5 m/s² em 2 segundos. |
Cabeçalho magnético | Ativar bússola magnética | O ambiente do campo magnético é relativamente estável. |
A Micro-Magic Inc. lançou produtos de sistemas de navegação inercial de alta precisão.
O Sistema de Navegação Inercial (INS) é a espinha dorsal do sistema de posicionamento para direção autônoma. Ele fornece informações contínuas, de alta frequência e sem interrupções sobre o estado de movimento e a atitude do veículo, sendo uma tecnologia fundamental para garantir a continuidade, robustez e capacidade de resposta em alta frequência do posicionamento. Especialmente em cenários desafiadores onde o GPS perde o sinal (túneis, cânions urbanos), o INS mantém sua capacidade de posicionamento por meio de estimação de posição, o que é uma parte indispensável da redundância de segurança. Embora seu erro cumulativo inerente precise ser integrado estreitamente com outros sensores (GNSS, sensores de velocidade das rodas, visão, LiDAR) para correção, na estrutura de fusão multissensor, o INS serve como o núcleo central, melhorando significativamente a precisão, a confiabilidade e o desempenho dinâmico de todo o sistema de posicionamento. Com o avanço da tecnologia de IMU (como a melhoria da precisão dos giroscópios MEMS e a miniaturização dos giroscópios a laser de estado sólido) e a otimização dos algoritmos de fusão, o papel do INS na direção autônoma se tornará cada vez mais importante.

Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português