
A bússola eletrônica (também conhecida como bússola digital) calcula a direção através da medição do campo magnético da Terra, muitas vezes sem a eficácia de um sinal de GPS ou de uma rede como complemento. Graças às suas vantagens de tamanho reduzido, baixo consumo de energia, alta precisão e miniaturização, é amplamente utilizada na medição de rumo magnético em aeronaves, embarcações e automóveis. No entanto, a bússola eletrônica apresenta algumas desvantagens inerentes: é facilmente afetada por interferências e erros de campos magnéticos externos, o que compromete a precisão das medições e limita sua aplicação. Portanto, é fundamental estudar métodos para compensar esses erros de medição.
Atualmente, existem muitos métodos para compensar erros de medição. Por exemplo, o método do coeficiente de compensação visa principalmente a interferência dinâmica durante a medição, enquanto o efeito da compensação da interferência estática é pequeno e o alcance de aplicação é limitado. Outro exemplo é o método de compensação adaptativa, que exige que o sistema atinja alta precisão de compensação em casos de movimento linear ou de baixa velocidade; se o sistema girar mais rápido, a precisão da medição será bastante afetada, portanto, cenários de aplicação mais exigentes tornam esse método pouco utilizado. Atualmente, se apenas um modelo de compensação de erros for usado para compensar o erro da bússola, ele não atenderá aos requisitos do sistema de medição. Neste artigo, propõe-se um algoritmo de compensação de erros baseado na hipótese da elipse, que integra o princípio dos mínimos quadrados. O algoritmo pode realizar uma compensação eficaz para o erro de medição da bússola eletrônica e possui as características de custo computacional moderado e ampla aplicabilidade.
Quando a bússola digital é instalada no veículo para medição de rumo magnético, seu erro de medição é causado por diversos fatores, que podem ser divididos em duas categorias principais: uma causada pela própria estrutura do sistema, materiais, montagem e outros fatores, incluindo erros na bússola, na instalação e na fabricação; a outra é o erro no sinal de atitude, que, embora não pertença ao sistema de medição de rumo em si, está envolvido no cálculo dos parâmetros de rumo e também causa erro de medição. Como o erro da bússola é o mais difícil de controlar e tem a maior influência na precisão do curso, este artigo analisa principalmente o erro da bússola. A diferença da bússola é composta principalmente pela componente horizontal do campo magnético de ferro duro e pela componente horizontal do campo magnético de ferro macio do veículo. Numerosos estudos experimentais mostram que o erro causado pelo campo ferromagnético duro no veículo em movimento é um erro periódico, que pode ser expresso pela fórmula (1), e sua regra é aproximadamente uma curva senoidal; o erro causado pelo campo magnético de ferro macio pode ser expresso pela fórmula (2), e a lei varia com a mudança do campo magnético ambiental.

Onde ϕi é a medida do ângulo de direção, e A, B, C, D e E são coeficientes de erro. Através da análise de erro da bússola acima, podemos ver que a bússola eletrônica total deve ser a soma algébrica dos erros acima. Portanto, combinando as fórmulas (1) e (2), encontramos a diferença total. ∆ϕ

O método dos mínimos quadrados (MQ) pode ser usado para encontrar a função que melhor se ajusta aos dados, minimizando a soma dos quadrados dos erros. É fácil obter dados desconhecidos e minimizar a soma dos quadrados dos erros entre eles e os dados reais. O método dos mínimos quadrados também pode ser usado para ajuste de curvas e é frequentemente empregado na otimização de dados.
O método dos mínimos quadrados otimiza o ajuste dos dados em termos de variância quadrática mínima. Trata-se de um método de otimização matemática que compensa o erro causado pela interferência do campo magnético do ambiente externo. Em circunstâncias normais, o erro de medição apresenta certa periodicidade; um método de ajuste mais adequado pode ser o método da função trigonométrica, baseado no modelo matemático da função de Fourier, e posteriormente corrigido de acordo com os parâmetros de direção fornecidos pela bússola padrão. A seguir, uma breve introdução aos princípios básicos dos mínimos quadrados.
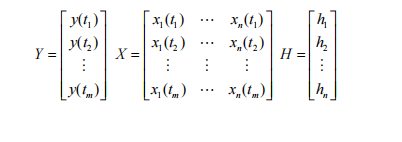
Quando é necessário determinar a correspondência entre duas variáveis y e x com base em observações, assumindo que elas sejam lineares, y no instante t pode ser expresso como:

Onde H1, H2, ..., Hn são n parâmetros desconhecidos a serem determinados, x1(t), x2(t), ..., xt(t) são funções determinísticas conhecidas, como as funções seno e cosseno de t. Suponhamos que, nos instantes t1, t2, ..., tn, sejam feitas m medições de y e x, com o objetivo de estimar os valores das variáveis y e x1(t), x2(t), ..., xt(t). Então, a fórmula (4) pode ser expressa na forma matricial: Y = X * H
Utilizando o método dos mínimos quadrados, as estimativas dos mínimos quadrados dos coeficientes de erro A, B, C, D e E mostradas na fórmula (3) são obtidas a partir da medição conhecida do ângulo de azimute. ϕi e erro de ângulo de azimute ∆ϕOs passos específicos para o cálculo são os seguintes: ① O método de medição de erro em oito posições foi adotado. Levando em consideração o número de amostras, a quantidade de cálculos de dados e a precisão da medição, oito pontos com o mesmo intervalo angular dentro da faixa de ângulo de direção de 360°, como 0°, 45°, 90°, 135°, 180°, 225°, 270° e 315°, foram selecionados para realizar o teste de erro de direção, obtendo-se 8 conjuntos de dados. ② Os coeficientes de erro A, B, C, D e E são obtidos de acordo com o princípio dos mínimos quadrados. Através da análise anterior, quando os coeficientes de erro A, B, C, D e E são calculados pelo método dos mínimos quadrados, o curso real do portador após a correção do erro pode ser calculado pela fórmula de cálculo, e a pesquisa e análise específicas não serão realizadas aqui.
A Micro-Magic é especializada em produtos de navegação. Além do método de compensação de erros mínimos, oferece compensação de erros por correção de anomalias elípticas e outros métodos. Durante o processo de pesquisa e desenvolvimento da bússola eletrônica, a empresa aprimorou gradualmente sua tecnologia e consolidou sua base teórica. Além da otimização contínua da precisão na localização do norte, nossos produtos incluem compensação de inclinação e outras funções. Se você se interessou por nossos produtos, convidamos você a conhecer nossa bússola digital 2D de baixo custo C9-C e a bússola 40.° Compensação de inclinação - bússola digital 3D C90-B e outros, você pode entrar em contato com nossa equipe profissional e técnica a qualquer momento.


Xml política de Privacidade blog Mapa do site
Direitos autorais @ Micro-Magic Inc Todos os direitos reservados.
 REDE SUPORTADA
REDE SUPORTADA



 Português
Português










