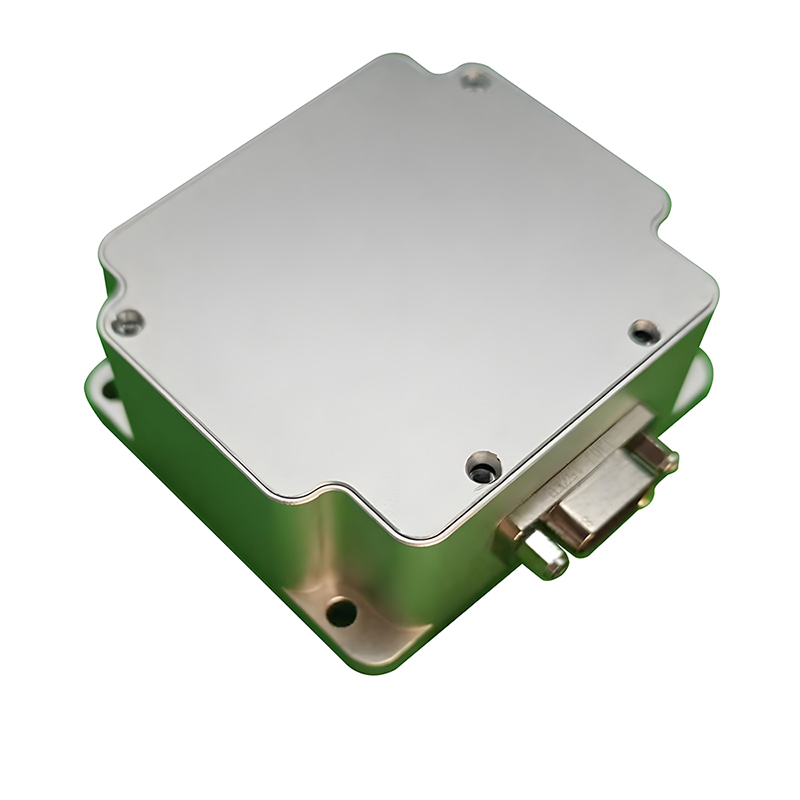
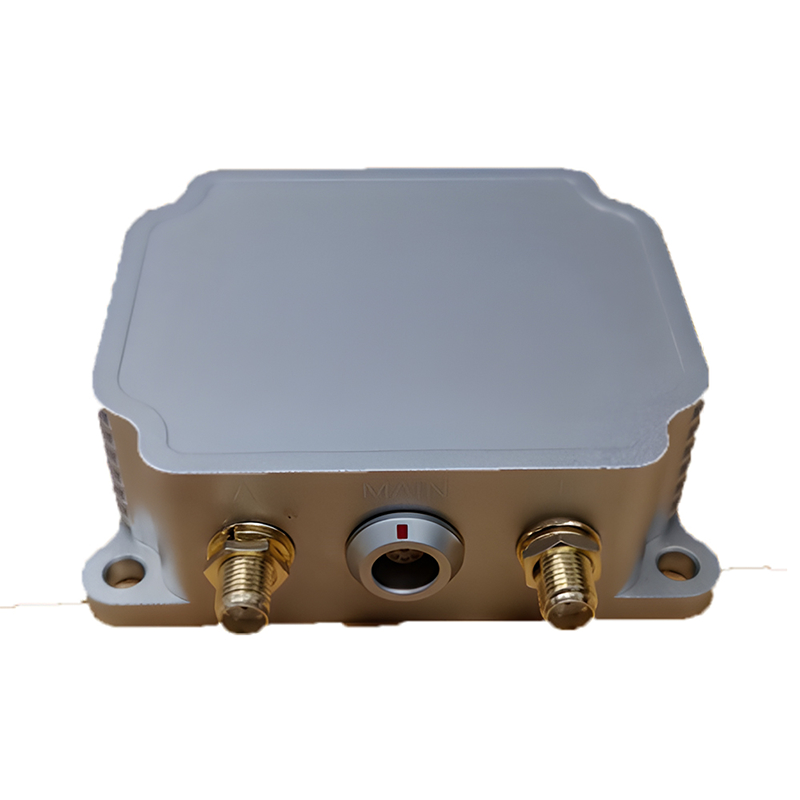
Produto: Sistema de Navegação Inercial Puro (INS) Baseado em IMU
Principais recursos:
O cálculo de posição de dados inerciais puros (IMU) é uma tecnologia de posicionamento comum. Ele calcula o objeto alvo em tempo real usando as informações de aceleração e velocidade angular obtidas pela Unidade de Medição Inercial (IMU), combinadas com as informações de posição inicial e atitude. posição. Este artigo apresentará os princípios, cenários de aplicação e alguns desafios técnicos relacionados ao cálculo de posição de dados de navegação inercial puro.
O cálculo de posição de dados de navegação inercial puro é um método de posicionamento baseado no princípio da medição inercial. IMU é um sensor que integra um acelerômetro e um giroscópio. Medindo a aceleração e a velocidade angular do objeto alvo em três direções, as informações de posição e atitude do objeto alvo podem ser derivadas.
No cálculo de posição de dados de navegação inercial puro, primeiro é necessário obter as informações de posição inicial e atitude do objeto alvo. Isto pode ser conseguido através da introdução de outros sensores (como GPS, bússola, etc.) ou calibração manual. A posição inicial e as informações de atitude desempenham um papel importante no processo de solução. Eles fornecem um ponto de partida para que os dados de aceleração e velocidade angular medidos pela IMU possam ser convertidos no deslocamento real e nas mudanças de atitude do objeto alvo.
Então, com base nos dados de aceleração e velocidade angular medidos pela IMU, combinados com as informações de posição inicial e atitude, integração numérica ou algoritmos de filtragem podem ser usados para calcular a posição do objeto alvo em tempo real. O método de integração numérica obtém a velocidade e o deslocamento do objeto alvo discretizando e integrando os dados de aceleração e velocidade angular. O algoritmo de filtragem usa métodos como filtragem de Kalman ou filtragem de Kalman estendida para filtrar os dados medidos pela IMU para obter a estimativa de posição e atitude do objeto alvo.
O cálculo de posição baseado em dados de navegação inercial puro é amplamente utilizado em muitos campos. Entre eles, a navegação interna é um dos cenários típicos de aplicação para cálculo de posição de dados de navegação inercial puro. Em ambientes internos, os sinais GPS geralmente não conseguem alcançar, e o cálculo puro da posição dos dados de navegação inercial pode usar os dados medidos pela IMU para obter o posicionamento preciso dos objetos alvo em ambientes internos. Isto é de grande importância em áreas como direção autônoma e robôs de navegação interna.
O cálculo de posição de dados de navegação inercial puro também pode ser usado no campo aeroespacial. Em aeronaves, uma vez que o sinal GPS pode sofrer interferência em grandes altitudes ou longe do solo, o cálculo de posição de dados de navegação inercial puro pode ser usado como método de posicionamento de backup. Ele pode calcular a posição e atitude da aeronave em tempo real através dos dados medidos pelo IMU, e fornecê-los ao sistema de controle de voo para estabilização de atitude e planejamento de trajetória de voo.
O cálculo da posição baseado em dados de navegação inercial puro ainda enfrenta alguns desafios em aplicações práticas. Em primeiro lugar, o próprio sensor IMU apresenta erros e ruídos, o que afetará a precisão do posicionamento. Para melhorar a precisão da solução, o sensor IMU precisa ser calibrado e compensado por erros, e um algoritmo de filtragem apropriado é usado para reduzir o erro.
O cálculo da posição baseado em dados de navegação inercial puros está sujeito a erros cumulativos durante movimentos de longo prazo. Devido às características da operação de integração, mesmo que a precisão da medição do sensor IMU seja alta, a integração a longo prazo levará ao acúmulo de erros de posicionamento. Para resolver este problema, outros meios de posicionamento (como GPS, sensores visuais, etc.) podem ser introduzidos para posicionamento auxiliar, ou um método de navegação inercial fortemente acoplado pode ser utilizado.
O cálculo da posição baseado em dados de navegação inercial puros também precisa considerar o impacto do ambiente dinâmico. Num ambiente dinâmico, o objeto alvo pode ser afetado por forças externas, causando desvios nos dados medidos pela IMU. Para melhorar a robustez da solução, os efeitos dos ambientes dinâmicos podem ser compensados através de métodos como estimativa de movimento e calibração dinâmica.
O cálculo de posição de dados inerciais puros é um método de posicionamento baseado na medição IMU. Ao adquirir dados de aceleração e velocidade angular, combinados com informações de posição inicial e atitude, a posição e atitude do objeto alvo são calculadas em tempo real. Possui amplas aplicações em navegação interna, aeroespacial e outros campos. No entanto, o cálculo da posição dos dados de navegação inercial puro também enfrenta desafios como erro de calibração, erro cumulativo e ambiente dinâmico. A fim de melhorar a precisão e robustez da solução, devem ser adotados métodos de calibração apropriados, algoritmos de filtragem e métodos auxiliares de posicionamento. O MEMS IMU desenvolvido independentemente pela Micro-Magic Inc tem precisão relativamente alta, como UF300A e UF300B, que têm maior precisão e são produtos de nível de navegação. Se você quiser saber mais sobre a IMU, entre em contato com nossos técnicos profissionais o mais rápido possível.

Xml política de Privacidade blog Mapa do site
Direitos autorais
@ Micro-Magic Inc. Todos os direitos reservados.
 SUPORTADO POR REDE
SUPORTADO POR REDE



 Português
Português